

PA 14 00 Servomotor potenciómetro.
#include <Servo.h> // Librería para el servomotor
Servo miServo; // Crear objeto Servo
int pinPot = A0; // Pin del potenciómetro
int pinServo = 9; // Pin del servomotor
void setup() {
miServo.attach(pinServo); // Conectar el servo al pin 9
}
void loop() {
int valorPot = analogRead(pinPot); // Leer el potenciómetro (0-1023)
int angulo = map(valorPot, 0, 1023, 0, 180); // Convertir a 0-180 grados
miServo.write(angulo); // Mover el servo
delay(50); // Pequeño retardo para estabilidad
}
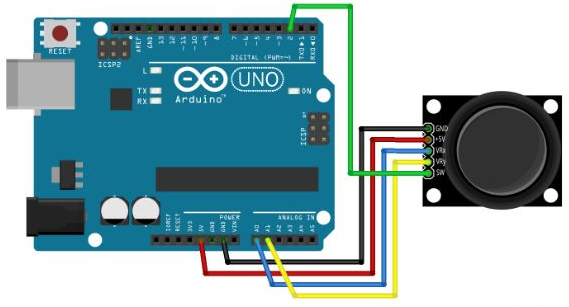
PA 14 01 Servomotor joystick.
#include <Servo.h> // Librería para el servomotor
Servo miServo; // Crear objeto Servo
int pinJoystickX = A0; // Pin del eje X del joystick
int pinServo = 9; // Pin del servomotor
void setup() {
miServo.attach(pinServo); // Conectar el servo al pin 9
}
void loop() {
int valorJoystick = analogRead(pinJoystickX); // Leer joystick (0-1023)
int angulo = map(valorJoystick, 0, 1023, 0, 180); // Convertir a 0-180 grados
miServo.write(angulo); // Mover el servo
delay(15); // Pequeño retardo para estabilidad
}
PA 14 02 Servomotor joystick guarda posición.
#include <Servo.h> // Librería para el servomotor
Servo miServo; // Crear objeto Servo
int pinJoystickX = A0; // Pin del eje X del joystick
int pinServo = 9; // Pin del servomotor
int angulo = 90; // Ángulo inicial en el centro
void setup() {
miServo.attach(pinServo); // Conectar el servo al pin 9
miServo.write(angulo); // Iniciar en el centro
}
void loop() {
int valorJoystick = analogRead(pinJoystickX); // Leer joystick (0-1023)
// Definir umbrales para considerar el joystick "centrado"
int centro = 512; // Valor medio
int margen = 50; // Margen para evitar movimientos no deseados
if (valorJoystick > centro + margen) { // Mover a la derecha
angulo = constrain(angulo + 2, 0, 180);
}
else if (valorJoystick < centro - margen) { // Mover a la izquierda
angulo = constrain(angulo - 2, 0, 180);
}
miServo.write(angulo); // Mover el servo a la nueva posición
delay(20); // Pequeño retardo para estabilidad
}